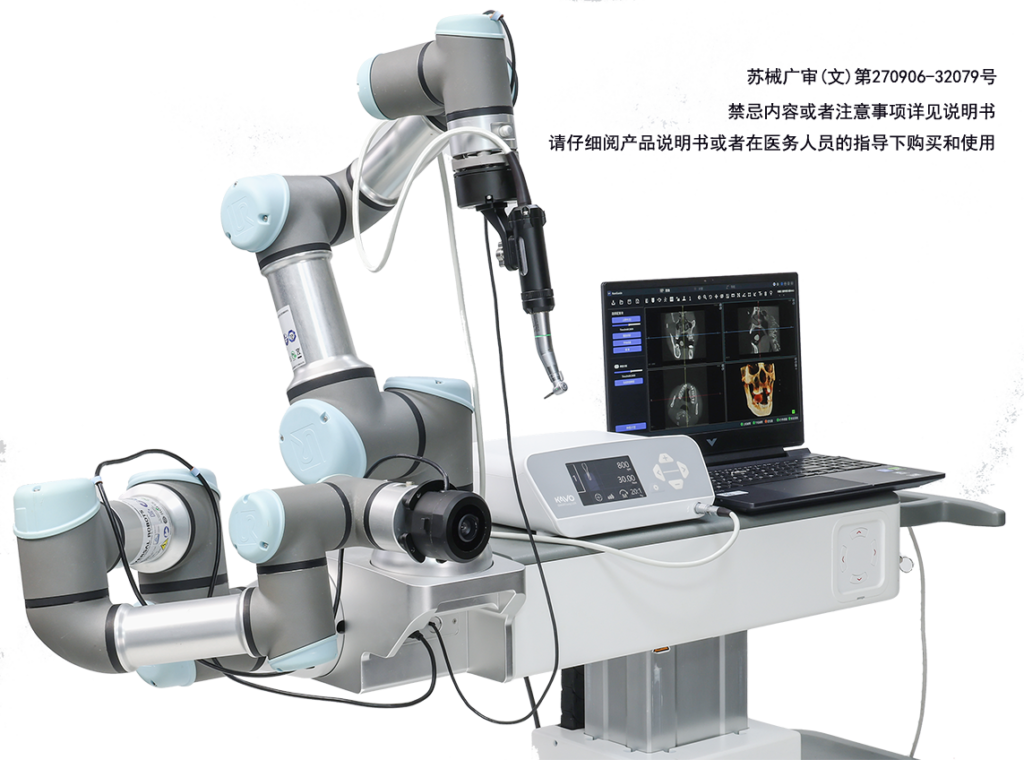
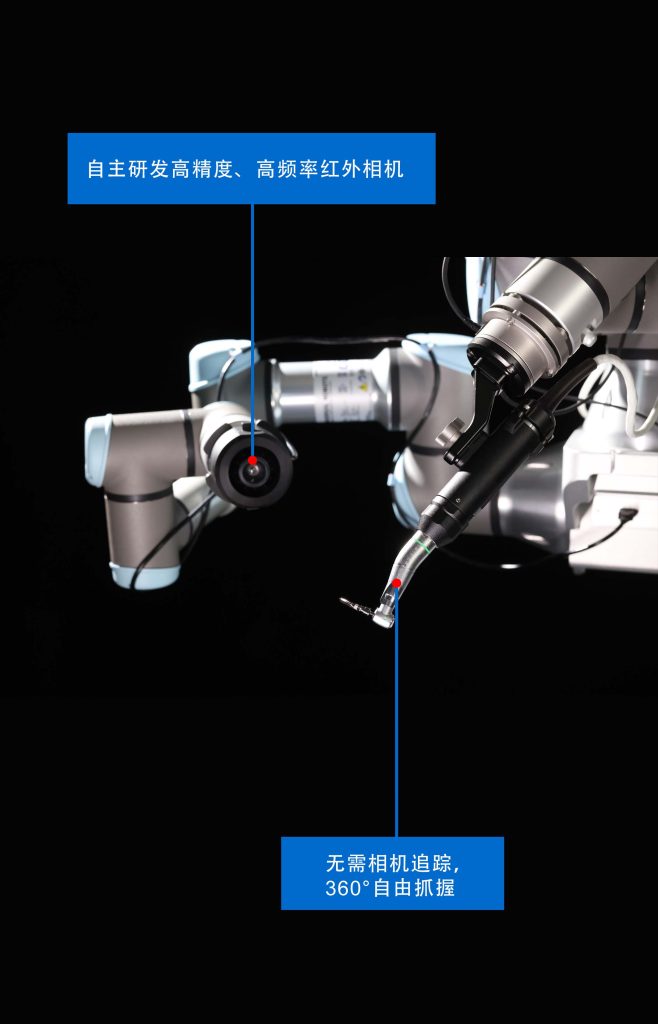
朗月口腔种植手术导航定位系统 红外跟踪探头 系统位置误差<1mm 双机械臂 一体机结构 主机械臂 副机械臂 占地仅 0.8 平方米 红外探头跟踪 种植手机夹持器 三维视觉导航系统搭配CT便于医生观察患者口腔内部 双模式应对不同临床需求 01 图像导航模式 佩戴夹板→拍摄CT→设计方案→术前摆位→开始手术 02 动态计划模式 佩戴夹板→拍摄CT→术前摆位→根据手机位置,图像上生成计划→开始手术 03 自由手辅助模式 佩戴夹板→术前摆位→开始手术 01 图像导航模式 佩戴夹板→拍摄CT→设计方案→术前摆位→开始手术 02 动态计划模式 佩戴夹板→拍摄CT→术前摆位→根据手机位置,图像上生成计划→开始手术 03 自由手辅助模式 佩戴夹板→术前摆位→开始手术